Internet-of-Things (IoT) GPS Relay Baton
MAE 4220 · Cornell University · 4-person Team (Member)
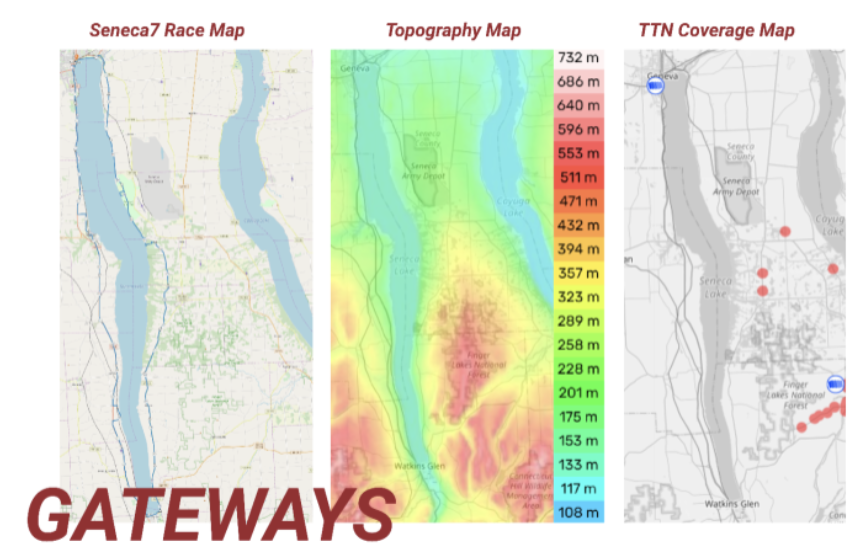
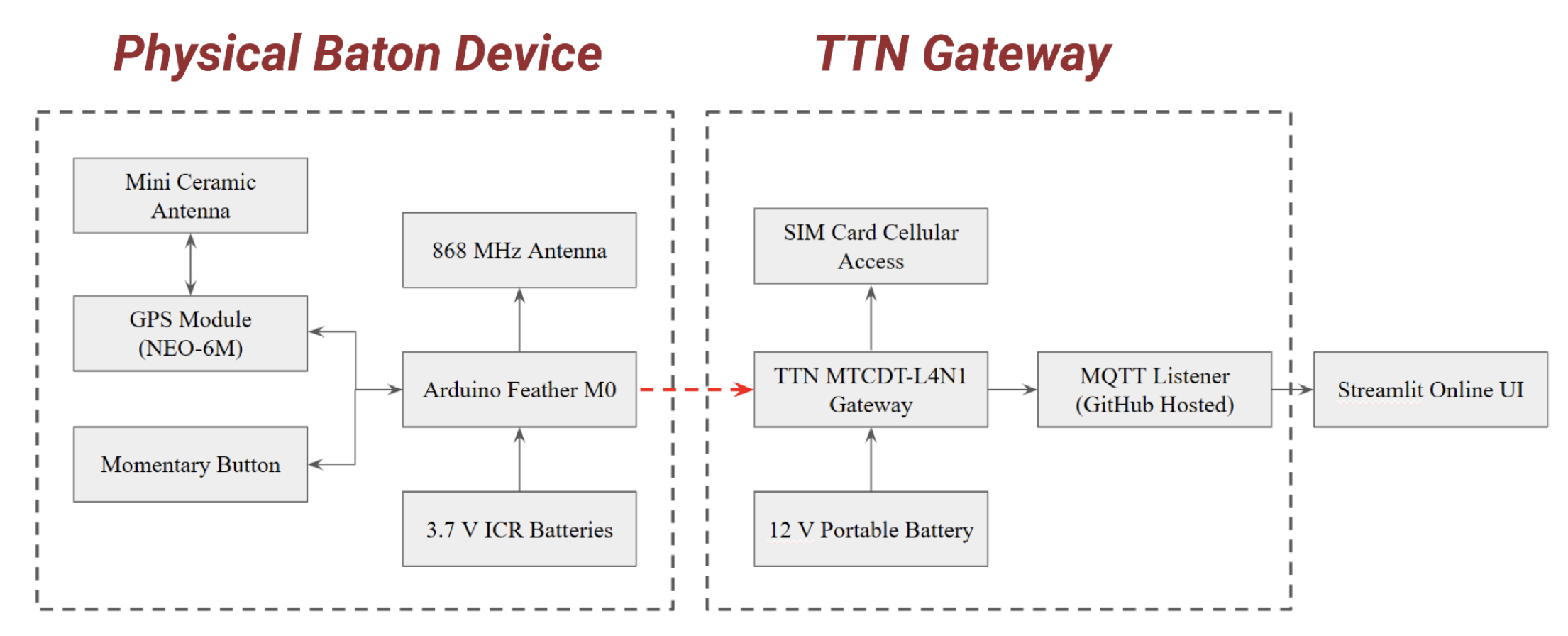
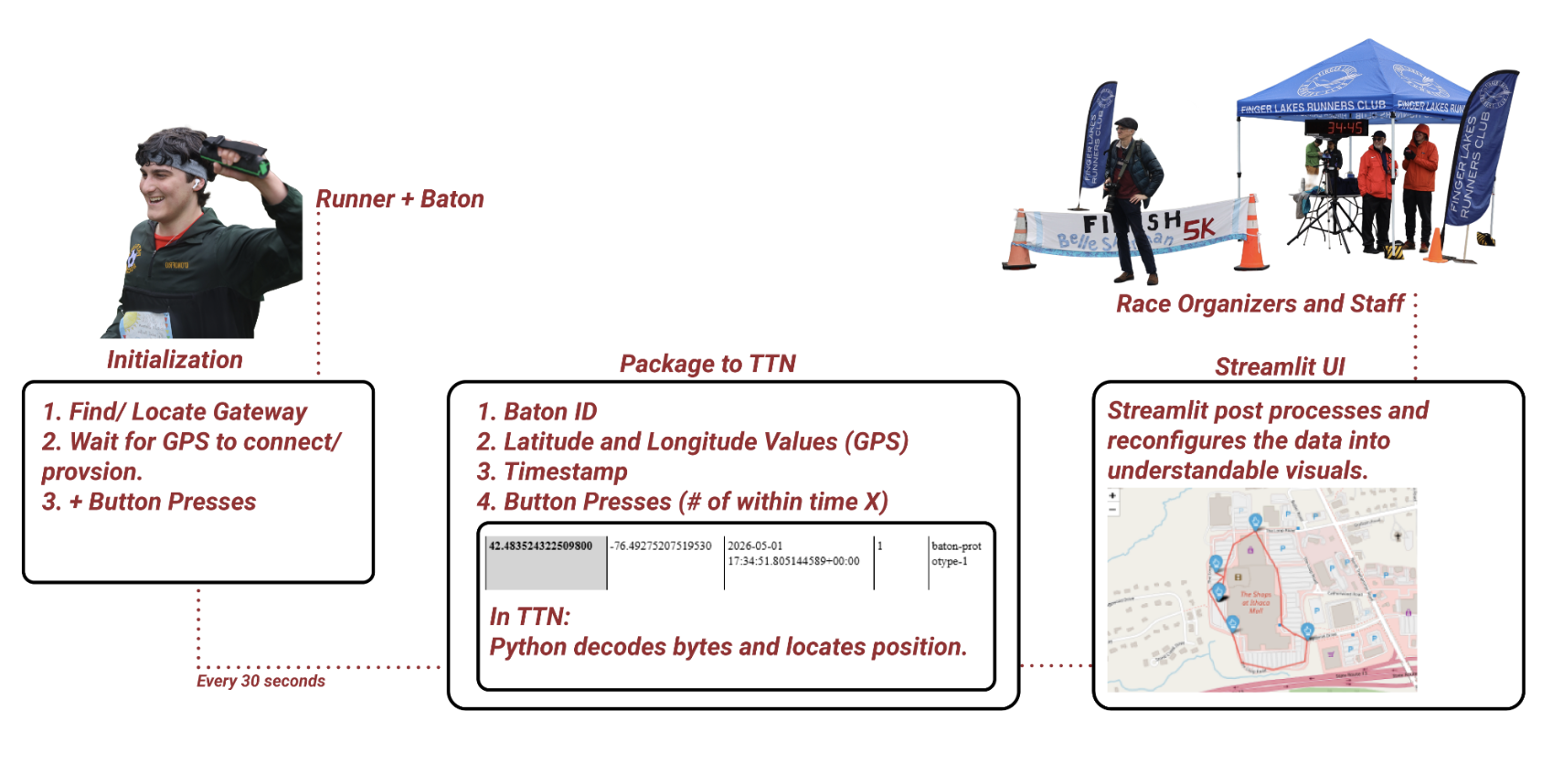
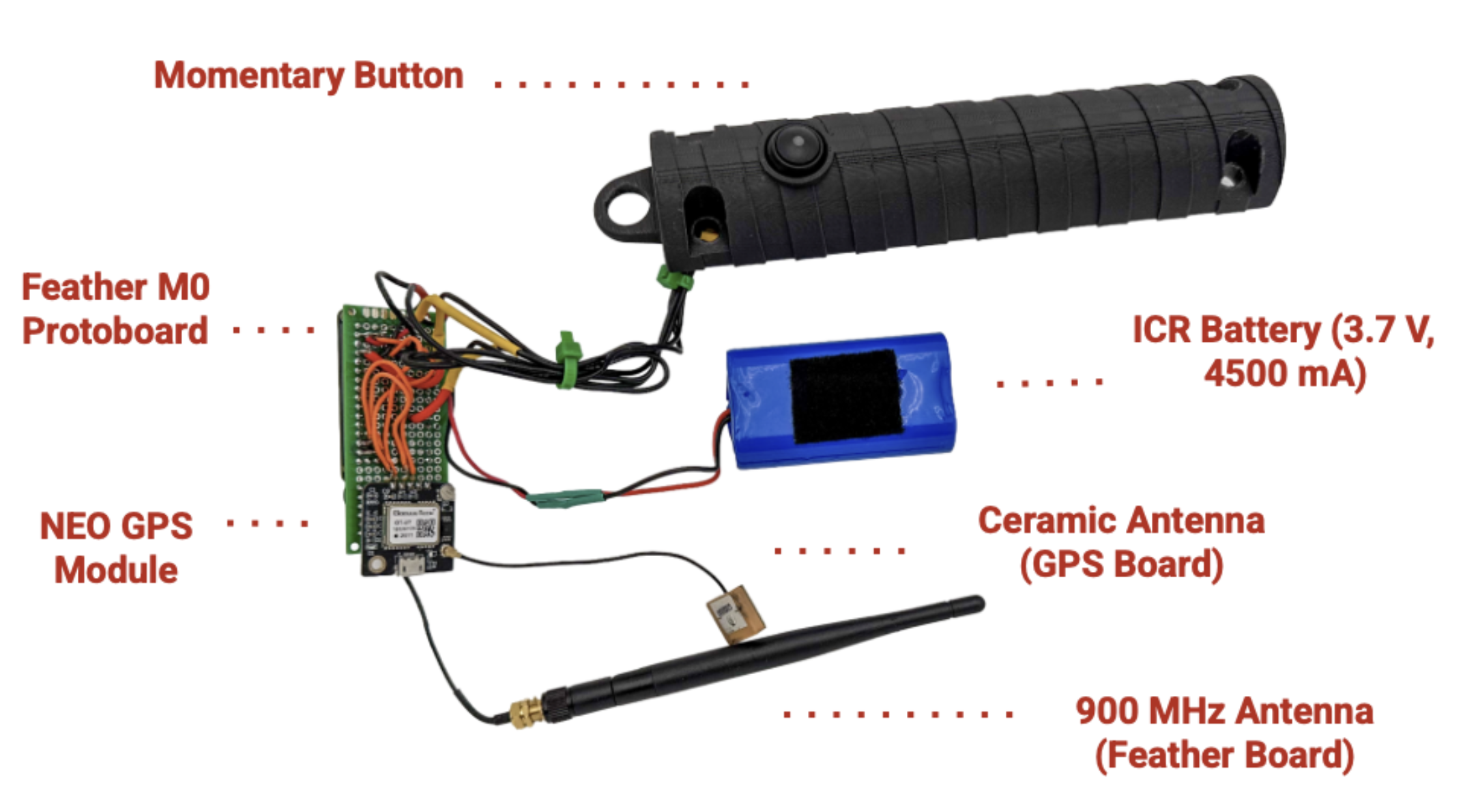
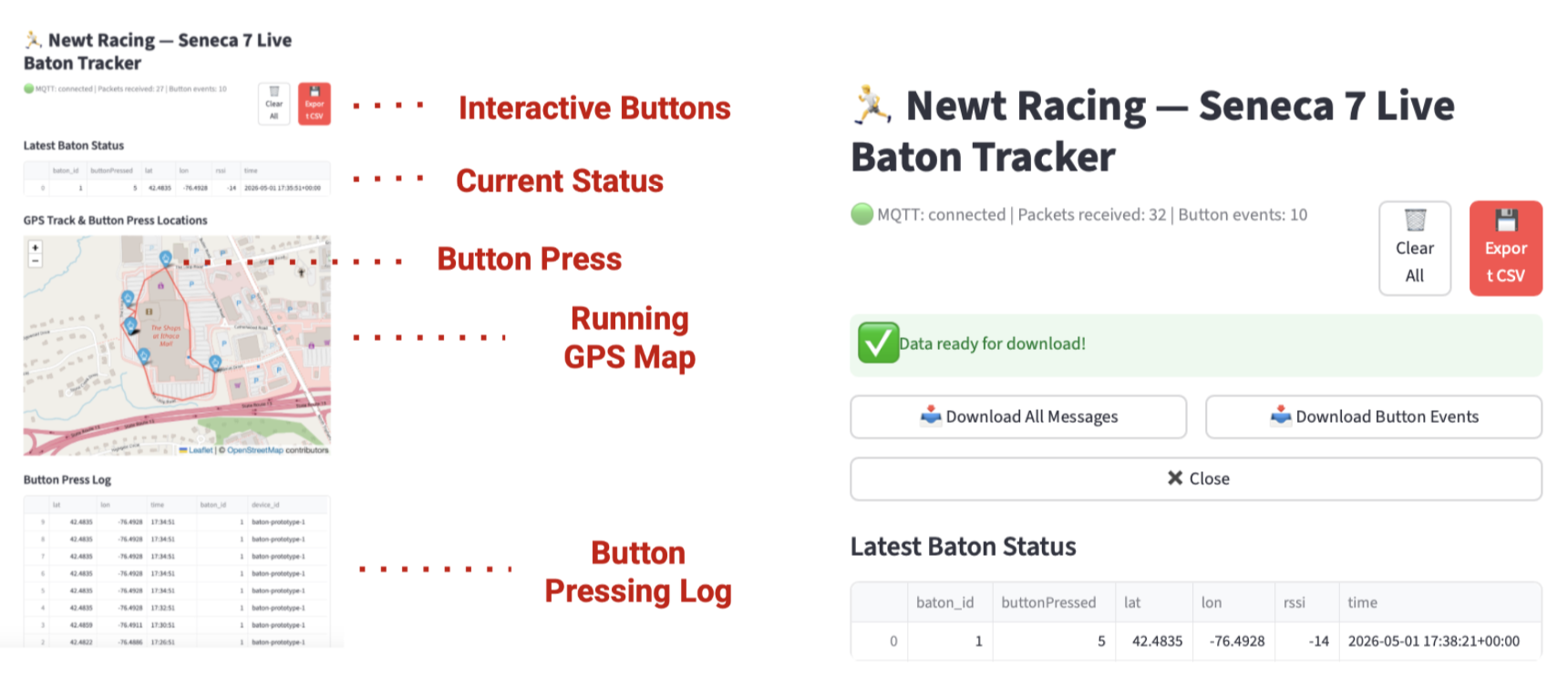
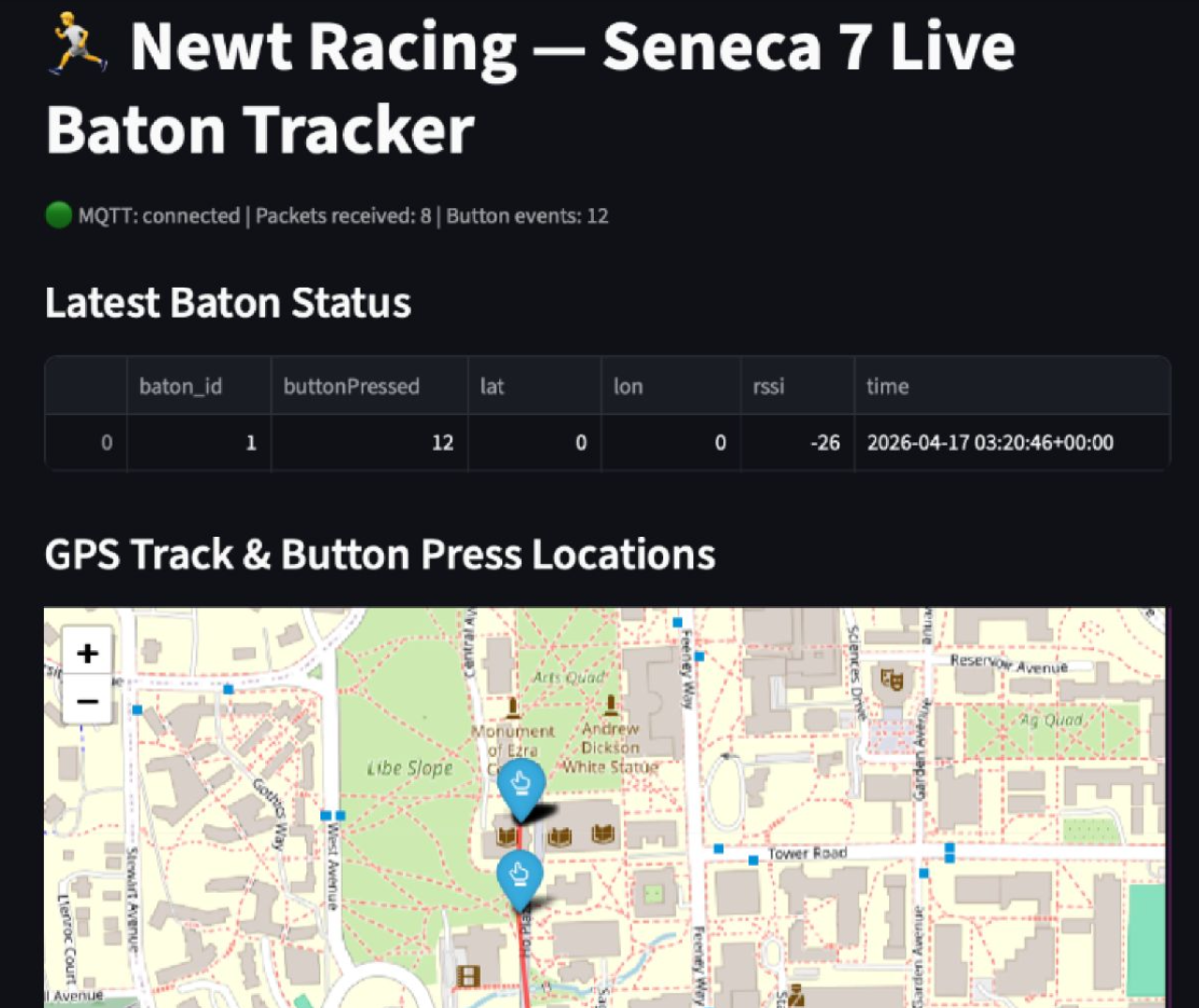
I built the electronics, firmware, software, and electromechanical design for a real-time GPS relay baton tracker, deployed for the Seneca 7, a 77.7-mile relay race with no reliable cellular coverage along most of the course.
 Final prototype (the Finalist) at Seneca 7 Race
Final prototype (the Finalist) at Seneca 7 Race
 Portable gateway with custom baton
Portable gateway with custom baton
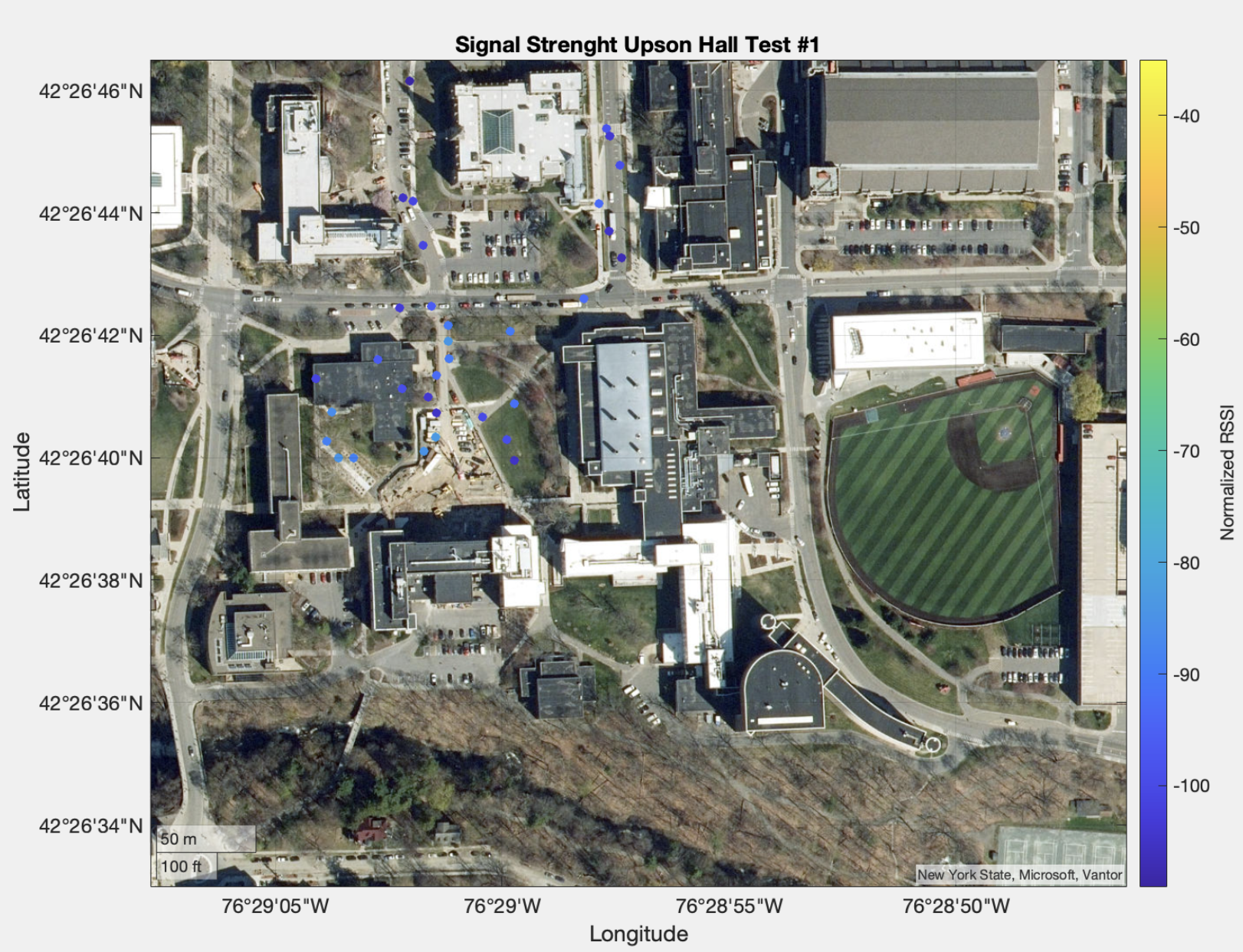
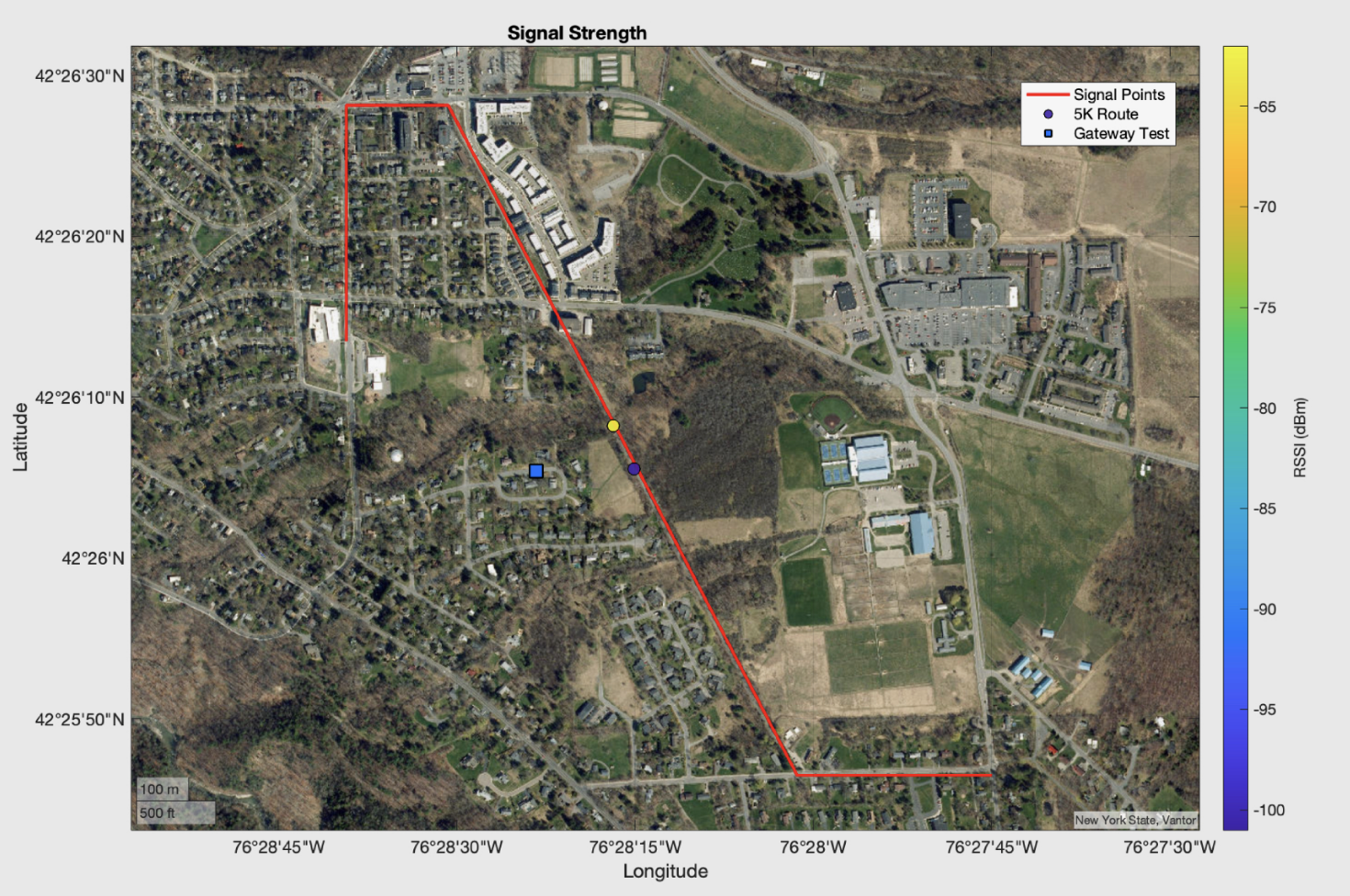
 Final prototype (the Finalist) at Bell Sherman 5k Run
Final prototype (the Finalist) at Bell Sherman 5k Run
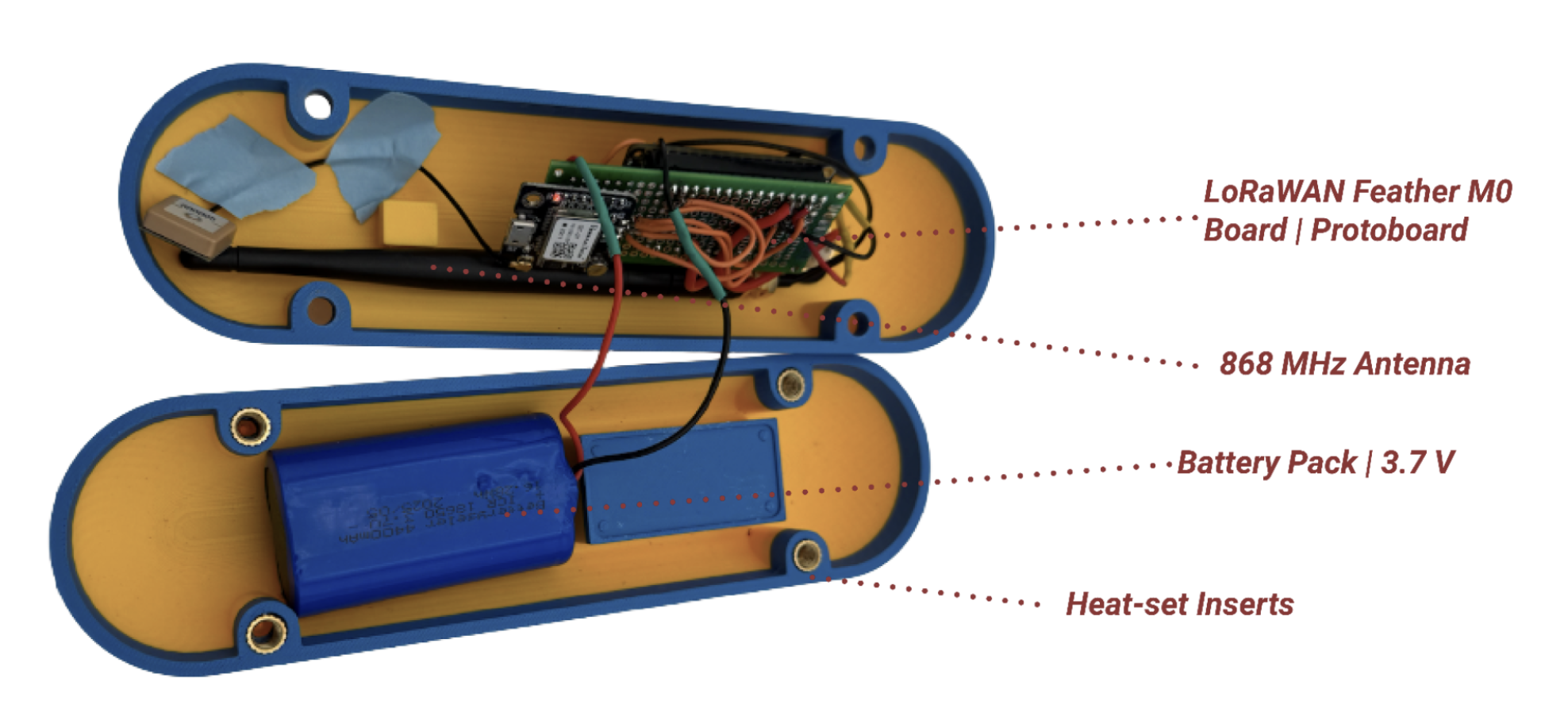
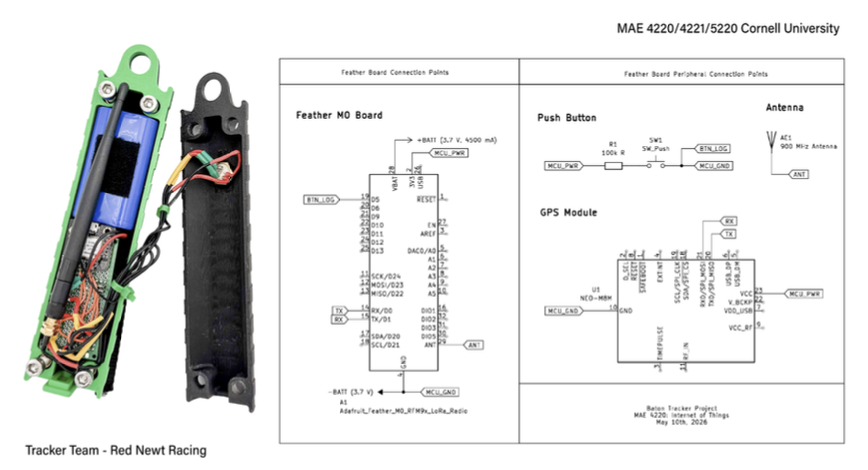
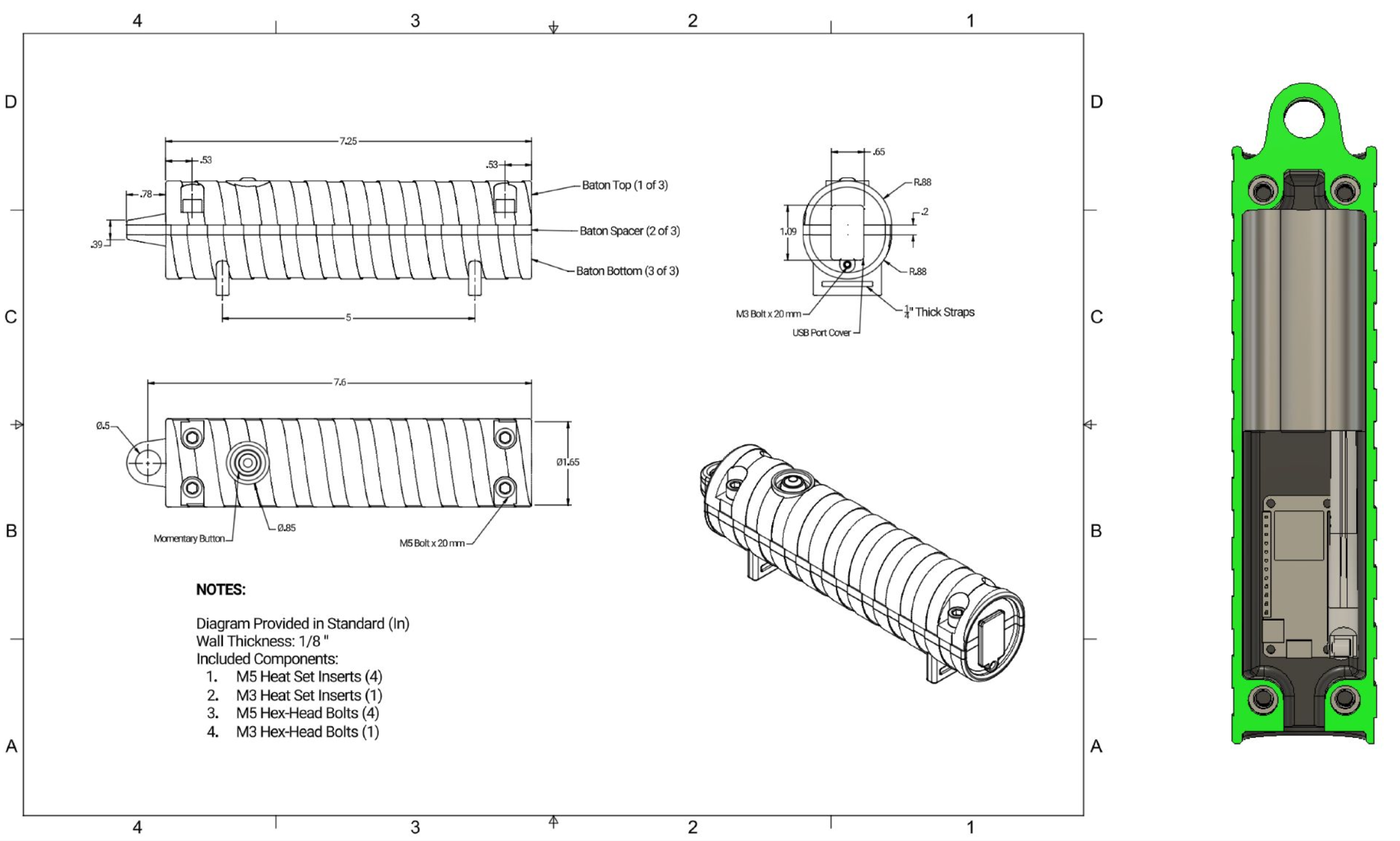 Engineering Drawing of the Finalist
Engineering Drawing of the Finalist
LoRaWAN
Embedded C++ (Feather M0)
GPS / GNSS
MQTT
Streamlit / Python
Fusion360
FDM Prototyping
User Research
Field Testing
Technical Leadership